![]()
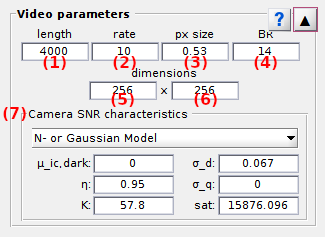
Video parameters
Video parameters is the first panel of module Simulation.
Access the panel content by pressing
 .
The panel closes automatically after other panels open or after pressing
.
The panel closes automatically after other panels open or after pressing
 .
.
Use this panel to define the settings of data acquisition like camera noise and video characteristics.
Panel components
Video length
Defines the total number of image frames in the video.
It is usually noted L
default: L = 4000 frames —
Video dimensions
Define the dimensions of video frames in pixels , following the x- (a) and y- (b) directions.
default: 256-by-256 pixels
Frame rate
Defines the acquisition rate of the video in frames per second (fps).
It is usually noted f and is linked to the acquisition time texp by the relation:

with texp in seconds
default: f = 10 fps
Pixel size
Defines the square dimensions of a pixel in micrometers.
It is used in the conversion of PSF widths from micrometers to pixels.
default: 0.53 μm
Bit depth
Defines the camera digitization bit depth in bit/pixel that sets the range of pixel values.
It is used to calculate the saturation pixel value in the video.
default: 14 bit/pixel
Camera SNR characteristics
Use this interface to define the camera noise distribution and the conversion of photon counts to images counts.
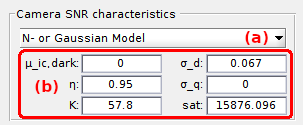
Select the camera noise model in (a) and set the corresponding parameters in (b).
Available camera noise models are:
- Offset only
- P- or Poisson
- N- or Gaussian
- NExpN- or Gaussian + exponential tail which is relatively time consuming; expect spending around 20 minutes to simulate a 256-by-256-wide and 4000 frame-long video
- PGN- or Hirsch
Refer to table Model parameters for an exhaustive list of model parameters.
Offset only
Photon counts μpc are ideally converted to image counts μic such as:

A constant camera dark count μic,d is then added.
default: μic,d = 113 ic
P- or Poisson
Photon counts μpc are converted to electron counts μec with a detection efficiency η such as:

Electron counts are distributed following a Poisson distribution and are ideally converted to image counts μic such as:

A constant camera dark count μic,d is then added.
default:
N- or Gaussian
Photon counts μpc are converted to electron counts μec with a detection efficiency η such as:

Electron counts are converted to image counts μic with an overall gain K such as:

A constant camera dark count μic,d is added and image counts are distributed following a Gaussian distribution of mean μic and standard deviation σic.
σic depends on μic, the readout noise standard deviation σd and the analog-to-digital noise standard deviation σq such as:

default: values taken from the literature (reference here):
NExpN- or Gaussian + exponential tail
Photon counts μpc are converted to electron counts μec with a detection efficiency η such as:

Electron counts are converted to image counts μic with an overall gain K such as:

A constant camera dark count μic,d is added and image counts are distributed following an exponential-tailed Gaussian distribution with mean μic, standard deviation σic, tail contribution ACIC and exponential decay constant τCIC.
This model is purely empirical: model parameters are obtained by fitting the distribution P of image counts obtain from a camera with closed shutter μic,0 with the function:
![\textup{P}(\mu_{\textup{ic,0}}) = ( 1-A_{\textup{CIC}} )\textup{exp}\left [ -\frac{( \mu_{\textup{ic,0}} - \mu_{\textup{ic,d}} )^{2}}{2\sigma_{\textup{ic}}^{2}} \right ] + A_{\textup{CIC}}\textup{exp}\left ( - \frac{\mu_{\textup{ic,0}}}{\tau_{\textup{CIC}}} \right )](../../assets/images/equations/sim-eq-cam-noise-09.gif)
To fit dark count distribution with the NExpN model, you can use our home-written script located at:
MASH-FRET/tools/fit_NExpN.m
default: values taken from the literature (reference here):
PGN- or Hirsch
Photon counts μpc are converted to electron counts μec with a detection efficiency η and a contribution of clock-induced charges CIC such as:

Electron counts are distributed following a Poisson distribution of mean μec and are then multiplied in the electron-multiplier (EM) register following a gamma distribution with shape parameter μec and the EM gain g, for scale parameter.
Multiplied electron counts are converted to image counts μic with an analog-to-digital factor s such as:

A constant camera dark count μic,d is added and image counts are distributed following a Gaussian distribution of mean μic and standard deviation σic that represent the readout noise standard deviation σd converted to image counts with the analog-to-digital factor s such as:

default: values taken from the literature (reference here):
Model parameters
The parameters used in camera noise models are summarized in the table below:
| parameter | units | description | in model |
|---|---|---|---|
| μic,d | ic | signal offset | none, P, N, NexpN, PGN |
| η | ec/pc | detection efficiency | P, N, NexpN, PGN |
| K | ic | overall gain | N, NExpN |
| sat (read only) | ic | saturation value | N |
| σd | ec | readout noise deviation | N, PGN |
| σq | ic | analog-to-digital conversion noise deviation | N |
| τCIC | ic | exponential tail decay constant | NExpN |
| ACIC | exponential decay contribution | NExpN | |
| σic | ic | Gaussian standard deviation | NExpN |
| g | system gain | PGN | |
| s | ec/ic | analog-to-digital factor | PGN |
| CIC | ec | CIC offset | PGN |
The saturation value is calculated from random distributions using the Bit rate. For more information about the saturation value calculations, please refer to the source code at:
MASH-FRET/source/mod_simulation/Saturation.m
Abbreviations:
- ic: image count
- pc: photon count
- ec: electron count
- CIC: clock-induced charges